3DS max建模教程:机器人(2)
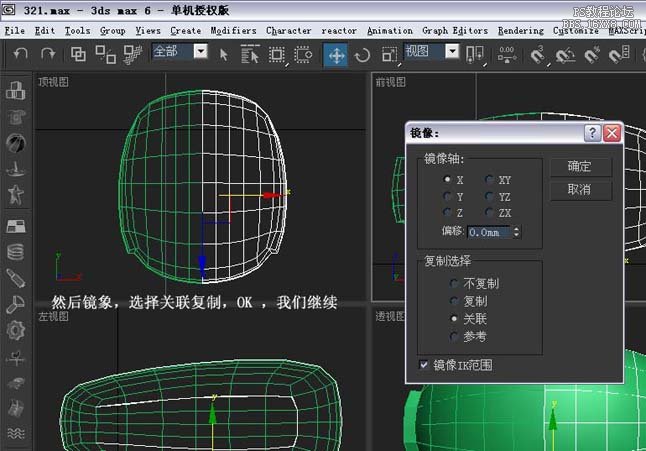
第八步:进行镜象操作,选择关联复制。
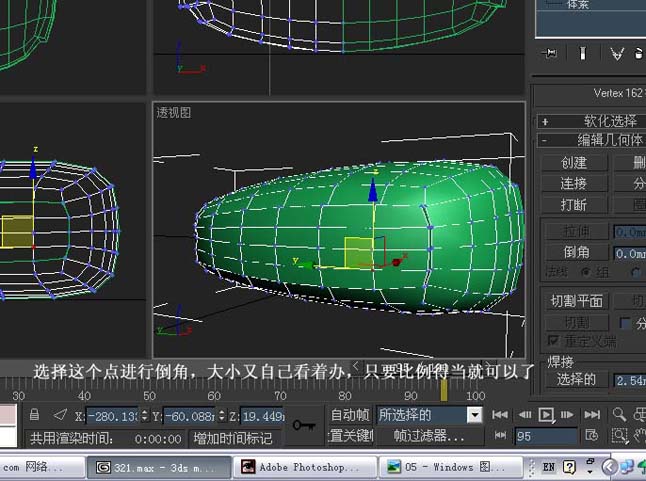
第九步:选择这个点进行倒角操作,大小自己定。
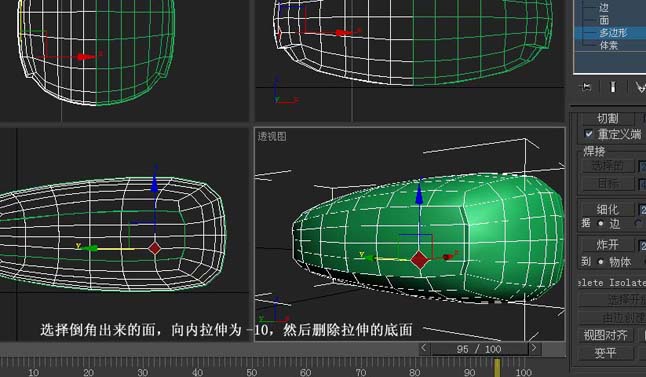
第十步:选择倒角出来的面,向内拉伸为-10,然后删除拉伸的底面。
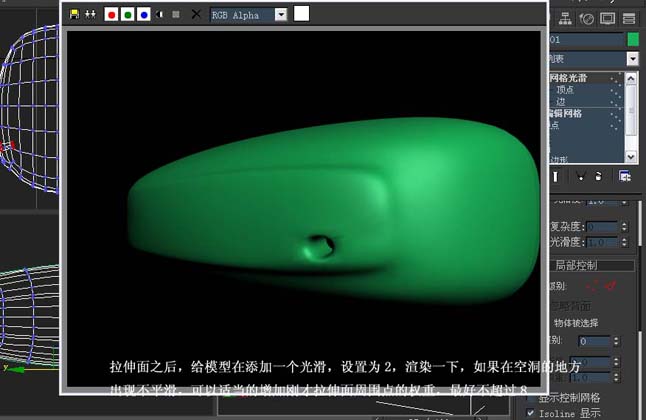
第十一步:拉伸面之后,给模型再添加一个光滑,设置为2,渲染一下,如果在空洞的地方出现不平滑,可以适当的增加刚才拉伸面周围点的权重,最好不超过8。
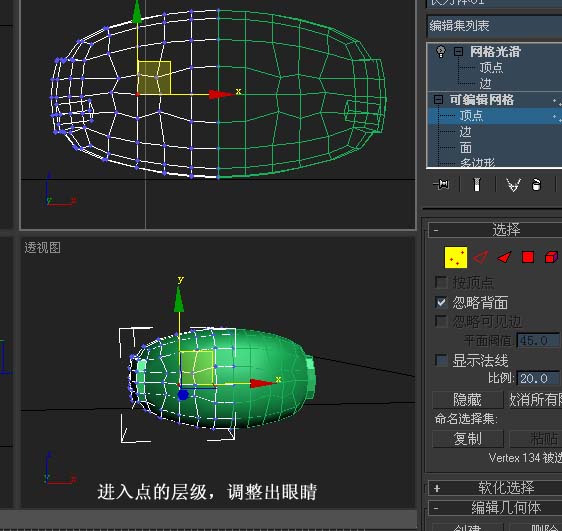
第十二步:进入点的层级,调整出眼睛。
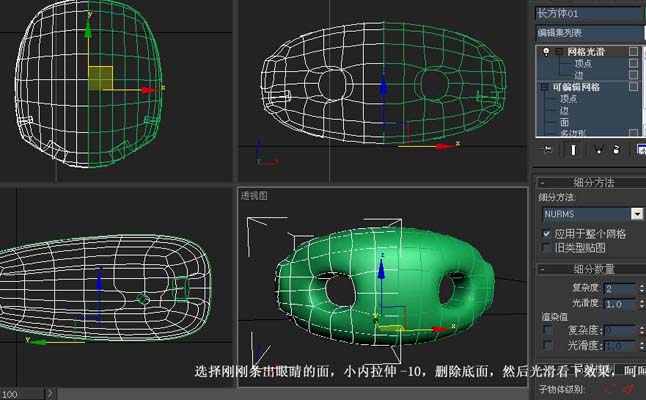
第十三步:选择刚刚调整出来的眼睛的面,向内拉伸-10,并删除底面,然后进行光滑看一下效果。
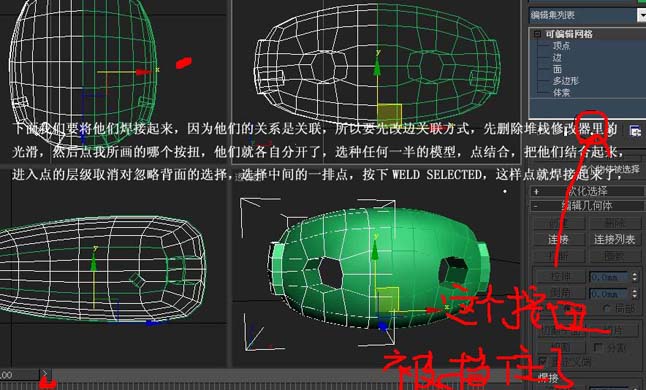
第十四步:下面我们要将他们进行焊接,因为他们的关系是关联的,所以要先改边关联方式,先删除堆栈修改器里的光滑,然后点我所画的那个按钮,他们就各自分开了,选一种任何一半的模型,进行点结合,把他们结合起来,进入点的层级取消对忽略背面的选择,选择中间的一排点,按一下WELD SELECTED,这样点就焊接起来了。
第十五步:选择头顶的四个面,进行拉伸为4。
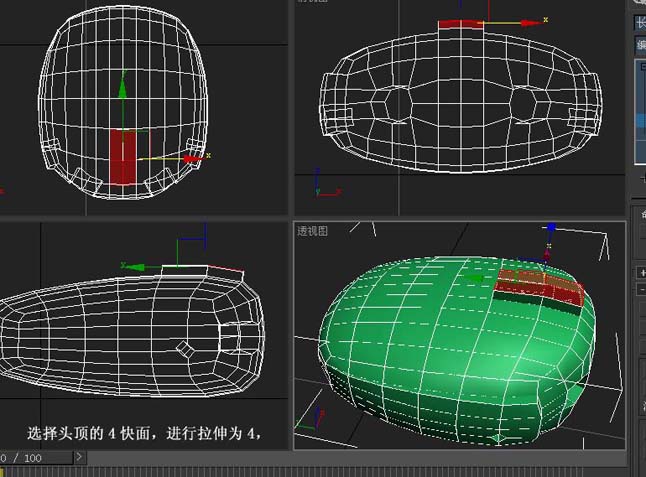
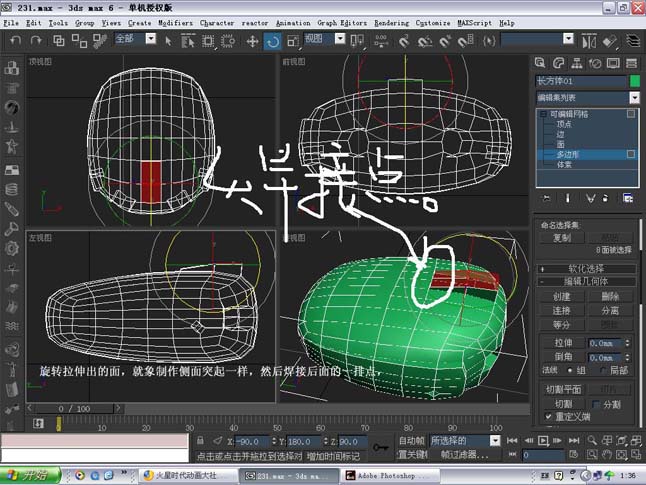
第十六步:旋转拉伸的面,就象制作侧面突起一样,然后焊接后面的一排点。

3335人学习过



相关教程






